|
Refined estimates of absolute water levels for inland waters from multi-mission satellite altimetry (WALESA) |
|---|
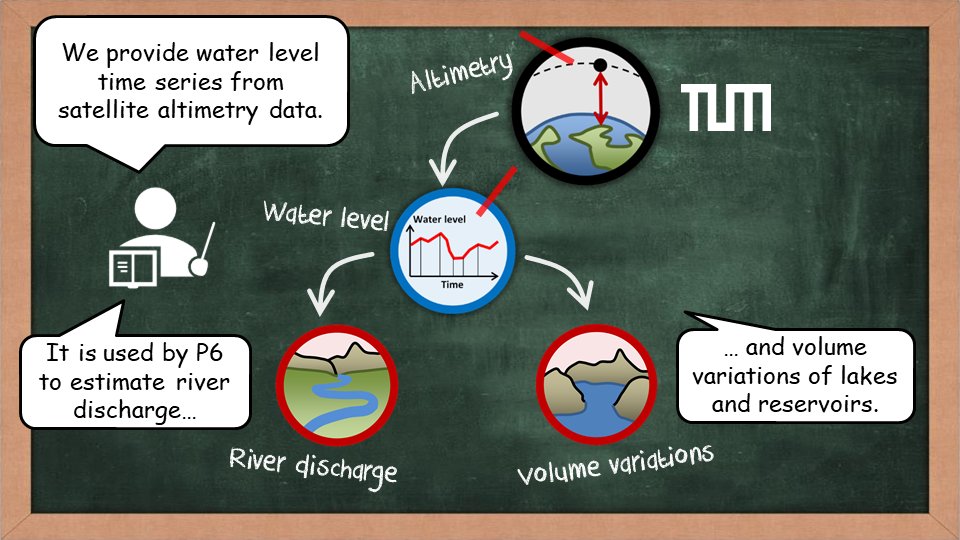
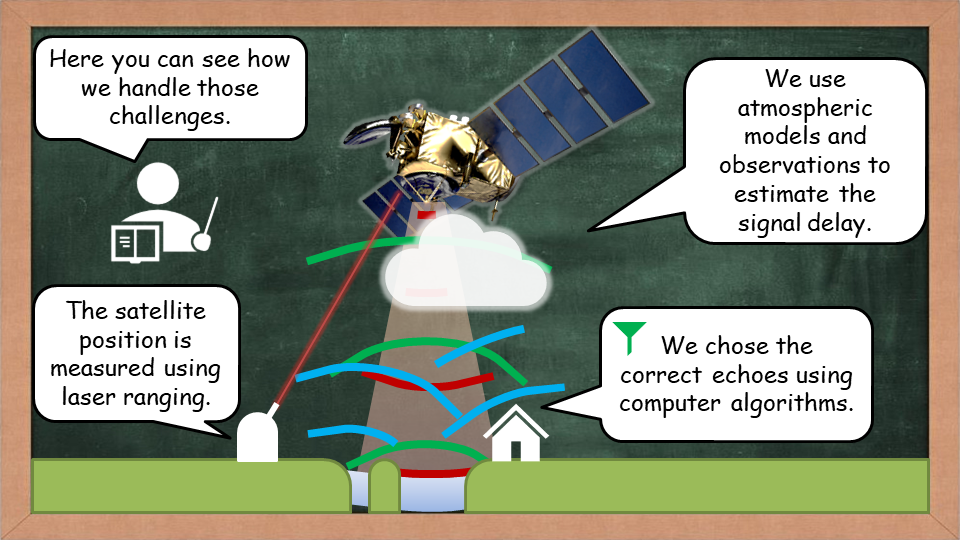
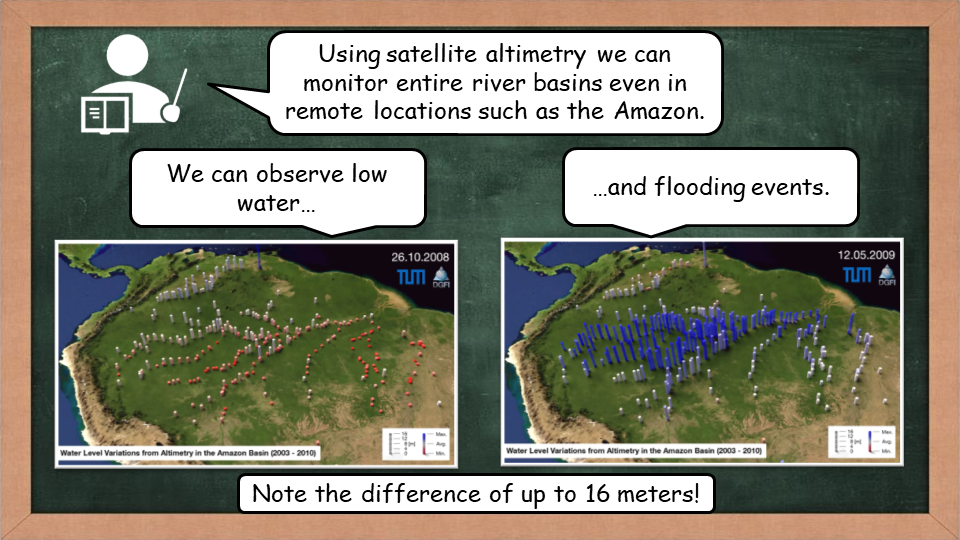
The main objective of project P5 is the development of innovative approaches for inland altimetry data analysis with special focus on automated methods in order to ensure reliable, fast, and comprehensive computation of water levels at best possible accuracy. This will allow for the estimation of volume changes for major surface waters beneath the satellites’ tracks (conducted by project P6) and is an inevitable prerequisite for monitoring and understanding the global freshwater system.
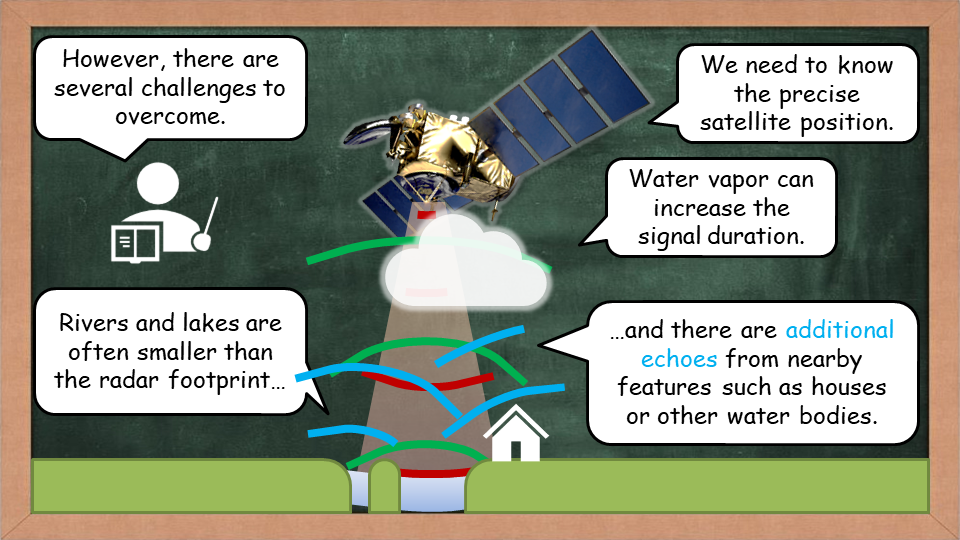
Important elements of the project are the Automated detection of inland water bodies, Waveform classification and Refined inland waveform retracking.
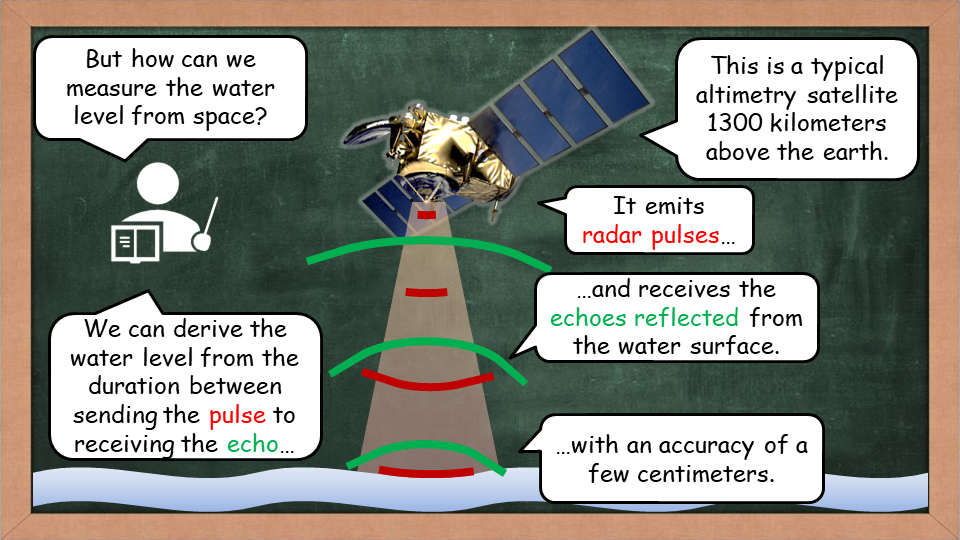
Below you can see a basic introduction to the principle and the challenges of satellite altimetry.